Development of a Soft-Inflatable Exosuit for Knee Rehabilitation
Saivimal Sridar, Pham H Nguyen, Mengjia Zhu, Quoc P Lam, Panagiotis Polygerinos
2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Keywords
Knee rehabilitation, soft pneumatic device, EMG and FSR sensing
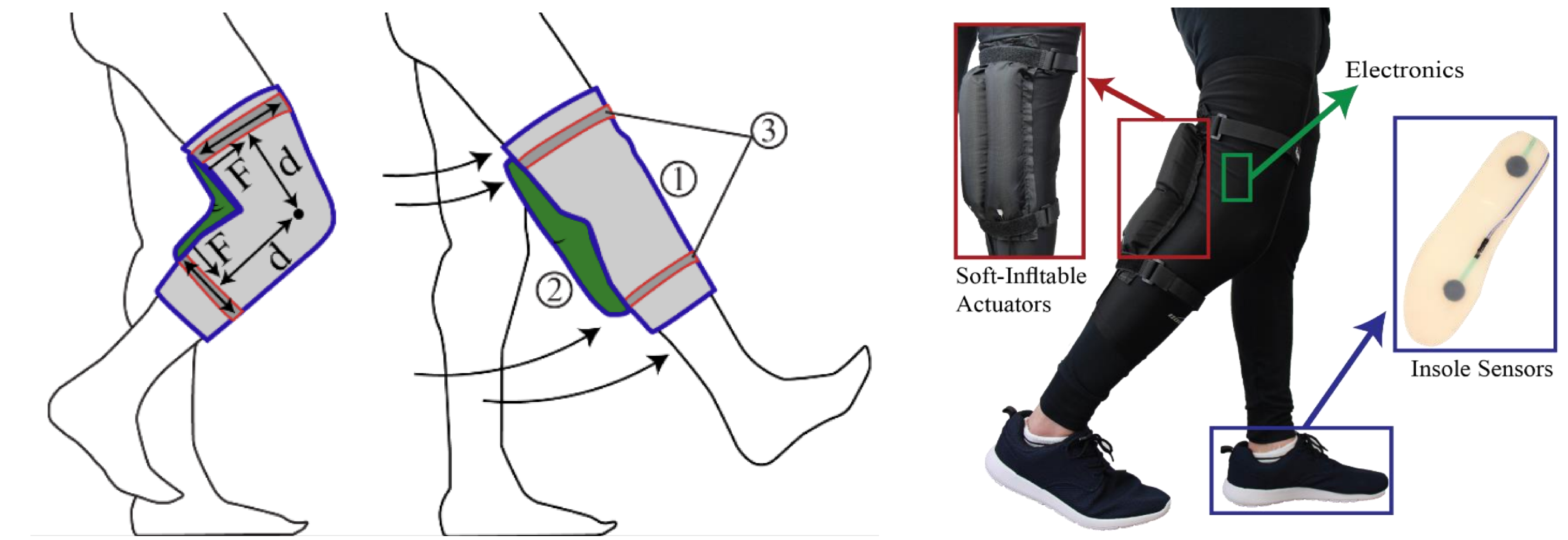
Image:
This paper presents the design, development and preliminary evaluation of a soft-inflatable exosuit for knee rehabilitation. Soft-inflatable actuators made of heat-sealable thermoplastic polyurethane (TPU) materials are fabricated in two different beam-like structures (I and O cross-section actuators) and mechanically characterized for their torque performance in knee-extension assistance. The fabrication procedure of both types of actuators is presented as well as their integration into a lightweight, low-cost and bodyconforming interface. To detect the activation duration of the device during the gait cycle, a soft-silicone insole with embedded force-sensitive resistors (FSRs) is used. In evaluation studies, the soft-inflatable exosuit device is tested for its ability to reduce muscle activity during the swing phase of the knee. Using sEMG (surface electromyography) sensors, the rectus femoris muscle group of a healthy individual is recorded while walking on a treadmill at a constant speed, with and without the soft device. Preliminary testing presents a promising 7% reduction in muscle activity and demonstrates the applicability of the soft-inflatable exosuit in knee rehabilitation scenarios.
Publications
Sridar, Saivimal, Pham H. Nguyen, Mengjia Zhu, Quoc P. Lam, and Panagiotis Polygerinos. "Development of a soft-inflatable exosuit for knee rehabilitation." In 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3722-3727. IEEE, 2017.
